Integer Programming
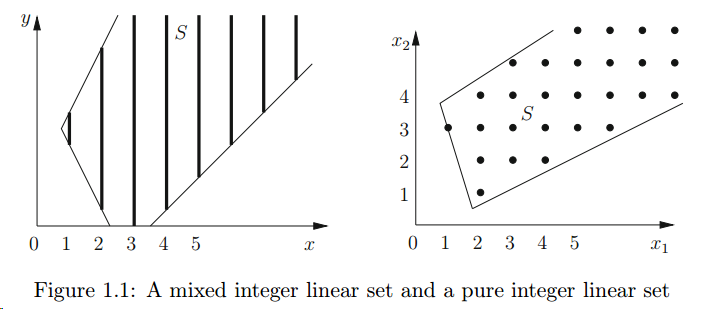
整数规划的general form \[ \begin{aligned} \max & &cx\\ \text{subject to}&&Ax\leq b\\ && x>0& &\text{integral} \end{aligned} \]
混合整数规划的general form \[ \begin{aligned} \max & &cx+hy\\ \text{subject to} && Ax+Gy\leq b\\ && x\geq 0 && \text{integral}\\ && y\geq 0 \\ \end{aligned} \]
举个简单的例子,两个变量的整数规划

按照线性规划来解很容易,最优解为\(x_1=1.3,x_2=3.3\),最大值为\(14.08\),但题中的两个变量都要求为是整数,所以我们的最优解为\(x_1=1,x_2=3\),最大值为\(11.8\)。如果变量个数少,则我们可以通过枚举法等手段来解,但是随着变量数量的增加,我们可行解的数量呈指数增长,所以我们必须要设计别的算法来解决整数规划问题。
Methods for Solving Integer Programs
解决整数规划主要有两种办法: - branch and bound 分支定界 - cutting plane 割平面
以下用\(x^*,y^*,z^*\)表示最优解,用\(x^0,y^0,z^0\)表示一组可行解。
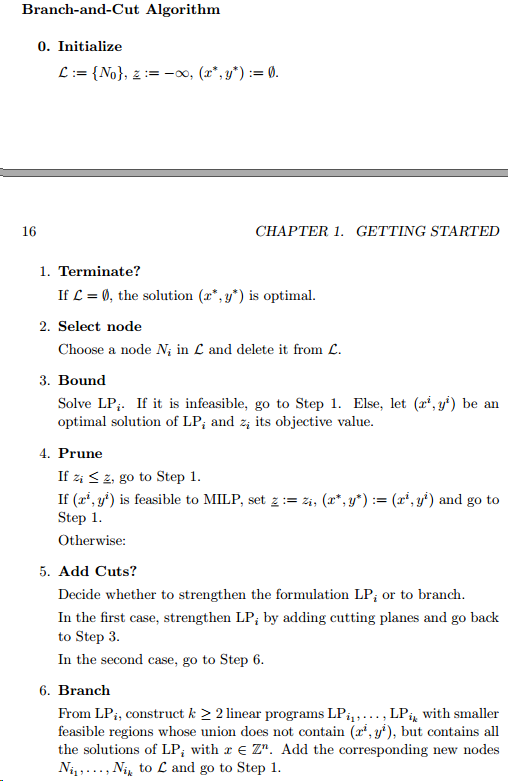
The Branch-and-Bound Method
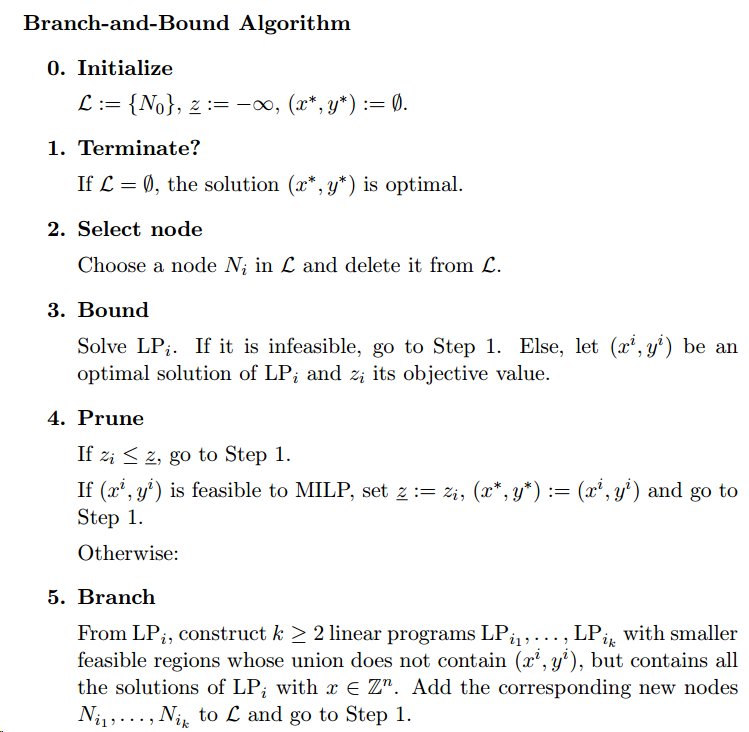
B&B主要的想法是通过上下界来逐步缩小可行域范围,如将变量\(x_j\)分成两部分,
\[ S_1=S \cap \{(x,y): x_j \leq \lfloor f \rfloor\},S_2=S \cap \{(x,y): x_j \geq \lceil f \rceil\} \]
然后分别计算两部分
\[ \text{MILP}_1:\max\{cx+hy:(x,y)\in S_1\},\text{MILP}_2:\max\{cx+hy:(x,y)\in S_2\} \]
这是我们可以对其约束做线性放松,然后计算每个线性问题的最优值作为整数规划的最优下界,
\[ \text{LP}_1:\max\{cx+hy:(x,y)\in P_1\},\text{LP}_2:\max\{cx+hy:(x,y)\in P_2\} \]
然后进行判断: - 如果其中一个线性规划无可行解,则其对应的整数规划无可行解,我们说该问题被pruned by infeasibility - 令\((x^i,y^i)\)为\(\text{LP}_i\)的最优解 - 如果\(x^i\) 都是整数,则\((x^i,y^i)\)为\(\text{MILP}_i\)的最优解,\(z_i\)为原问题的下界,此时我们说问题被pruned by integrality - 如果\(x^i\) 不全是整数且并且\(z_i\)比原问题的下界小,则这部分可行域上不存在最优解,我们说这个问题被pruned by bound - 如果\(x^i\) 不全是整数且并且\(z_i\)比原问题的下界大,则\(S_i\)肯定包含更优的解,然后对这部分可行域重复该过程
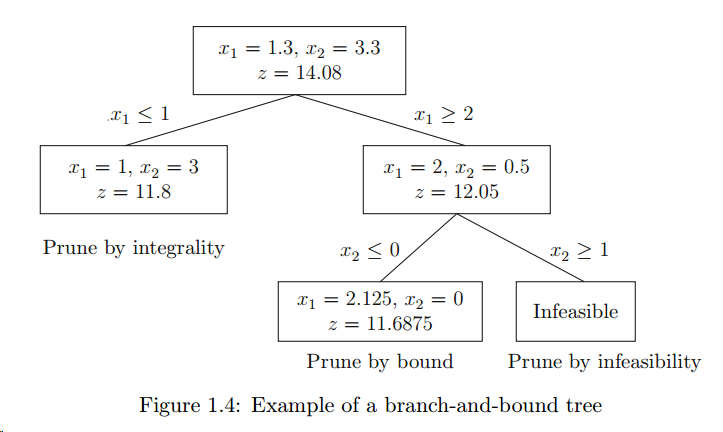
通过不断去划分支来分割可行域,并删除不需要的部分来找到最优的过程,这种方法就被称为branch and bound。
The Cutting Plane Method
割平面法是用来解决初始解并不在\(S\)中,核心的想法是找到一个不等式\(\alpha x + \gamma y\leq \beta\),满足在\(S\)中的每个点都有\(\alpha x^0 + \gamma y^0 > \beta\)。这样不等式的存在保证了\((x^0,y^0)\)一定会是一个基础解。
定义 \[ P_1=P_0\cap\{(x,y):\alpha x+ \gamma y\leq\beta\} \] 则有\(S\subseteq P_1\subset P_0\),这样放松的混合整数规划问题会比线性放松约束的整数规划问题要stronger(这个词不好翻译,大家意会) \[ \max\{cx+hy:(x,y)\in P_1\} \] 是关于最优解\(z^*\)的一个足够好的上界。
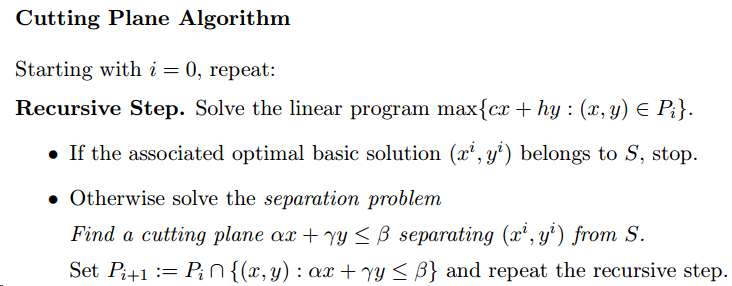
关于如何cut的方式后面会具体讲到,比较出名的是Gomory fractional cut。
给我感觉,B&B和CP两种方式一个是从可行解出发,将可行解作为原问题的最优解的下界,即所有可能成为最优解,肯定会比这组解大,然后不断去求子问题的上界,如果子问题上界小于这个下界,则最优解必然不在这个子问题的可行域里,如果子问题上界大于这个下界,则继续划分子问题的可行域,总体来说是在可行域中往边界走(因为最优值必然在边界处取得),而CP,更是像一种,知道了非可行最优解的上界,然后不断地切割可行范围,得到可行的最优解,是一种从可行域外往可行域边界上走,不断拉低松弛问题的最优上界,得到原问题的最优解。
注:写到这里我才发现自己通篇都用的是原问题这种描述,可能会和以后对偶的原问题混淆,所以本篇中的原问题都指的是初始问题!
The Branch-and-Cut Method
在B&B的问题中,由于是直接线性放松约束条件,会产生较大的间隔,这样会产生一个很大的树状结构,这时我们就可以用割平面来缩紧上界,这样就有了B&C
Complexity
- 多项式复杂度
- NP
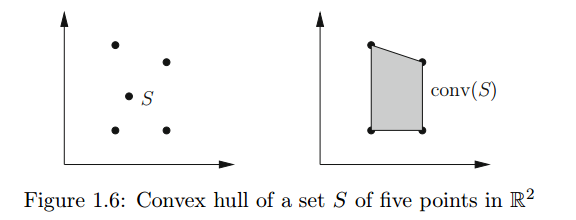
Convex Hulls and Perfect Formulations
- 凸包的定义